Do leases buy us anything?
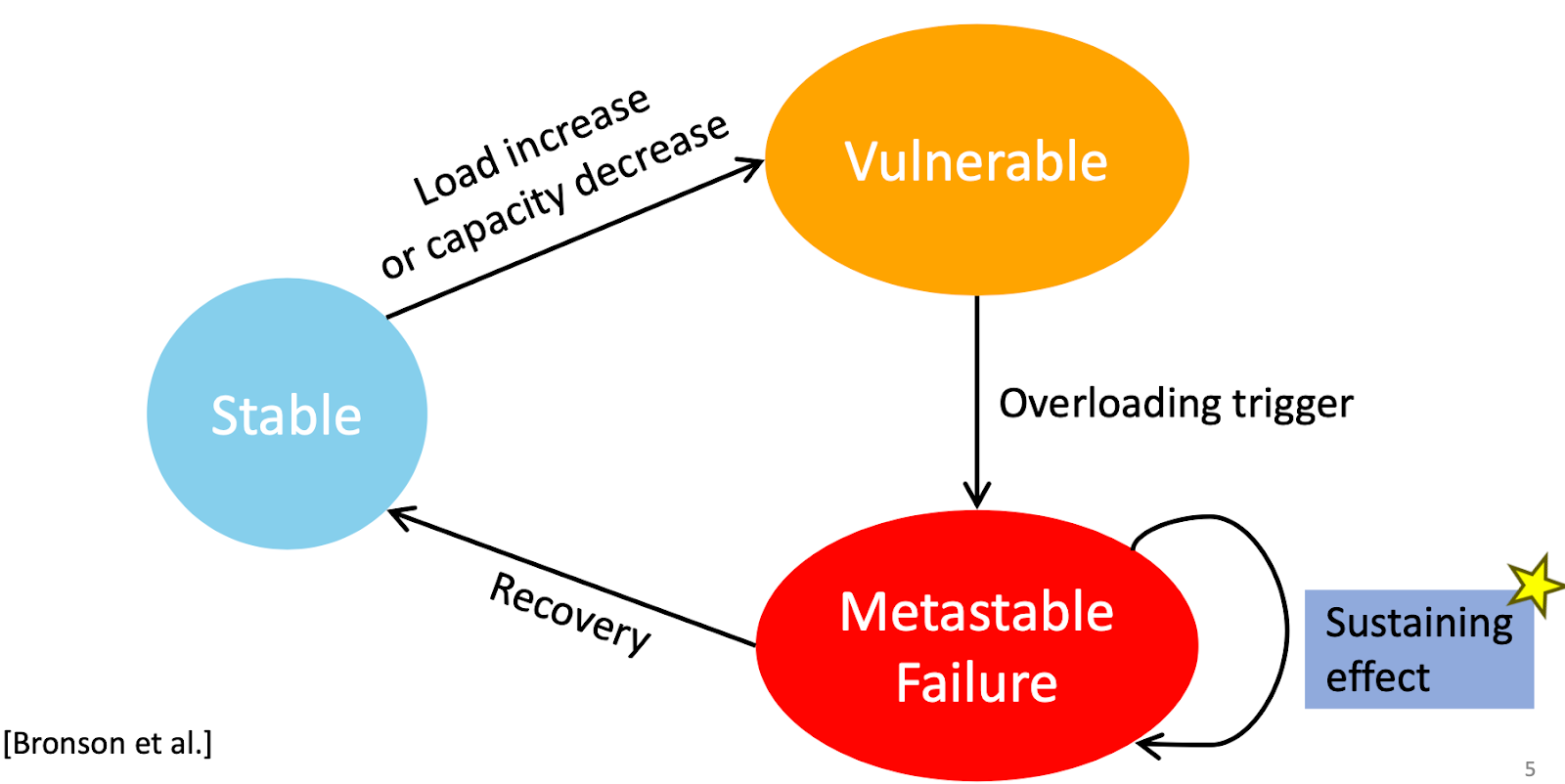
Consider the atomic storage problem , which is a simpler problem than consensus. CAP theorem says that when there is a partition, you will need to sacrifice strong-consistency or high-availability. Using leases, it is possible to sacrifice availability for sometime (until lease expires), and reconfigure the storage system (often by shrinking the quorum) to keep providing availability. Consistency is preserved throughout, and availability is sacrificed only during lease expiration time. This is a good tradeoff. (I am going to bring up the question of whether this may help circumvent CAP at the end of the post.) But is this power unique to leases? Is there a way to explain this in an alternate way using only failure detectors instead of leases? This is the question I want to explore here. Many distributed systems implement leases with just countdown timers and without NTP timestamps. This is because in the short-term the rate of clocks at processes don't drift too much. So ma